|
Minsik Jeon
Hello! I am a MS in Robotics student at Carnegie Mellon University (CMU), advised by Prof. Shubham Tulsiani.
I am interested in 3D and 4D reconstruction from perceptual input, and its applications in robotics.
|

|
Education
• Carnegie Mellon University, 2025.08-Present● M.S. in Robotics • Korea Advanced Institute of Science and Technology (KAIST), 2018.03-2022.02● B.S. in Computer Science, Electrical Engineering (Double Major) ● Summa Cum Laude • Gyeonggi Science High School for Gifted Students, 2015.03-2018.02 |
Publications(* denotes Equal Contribution) |
|
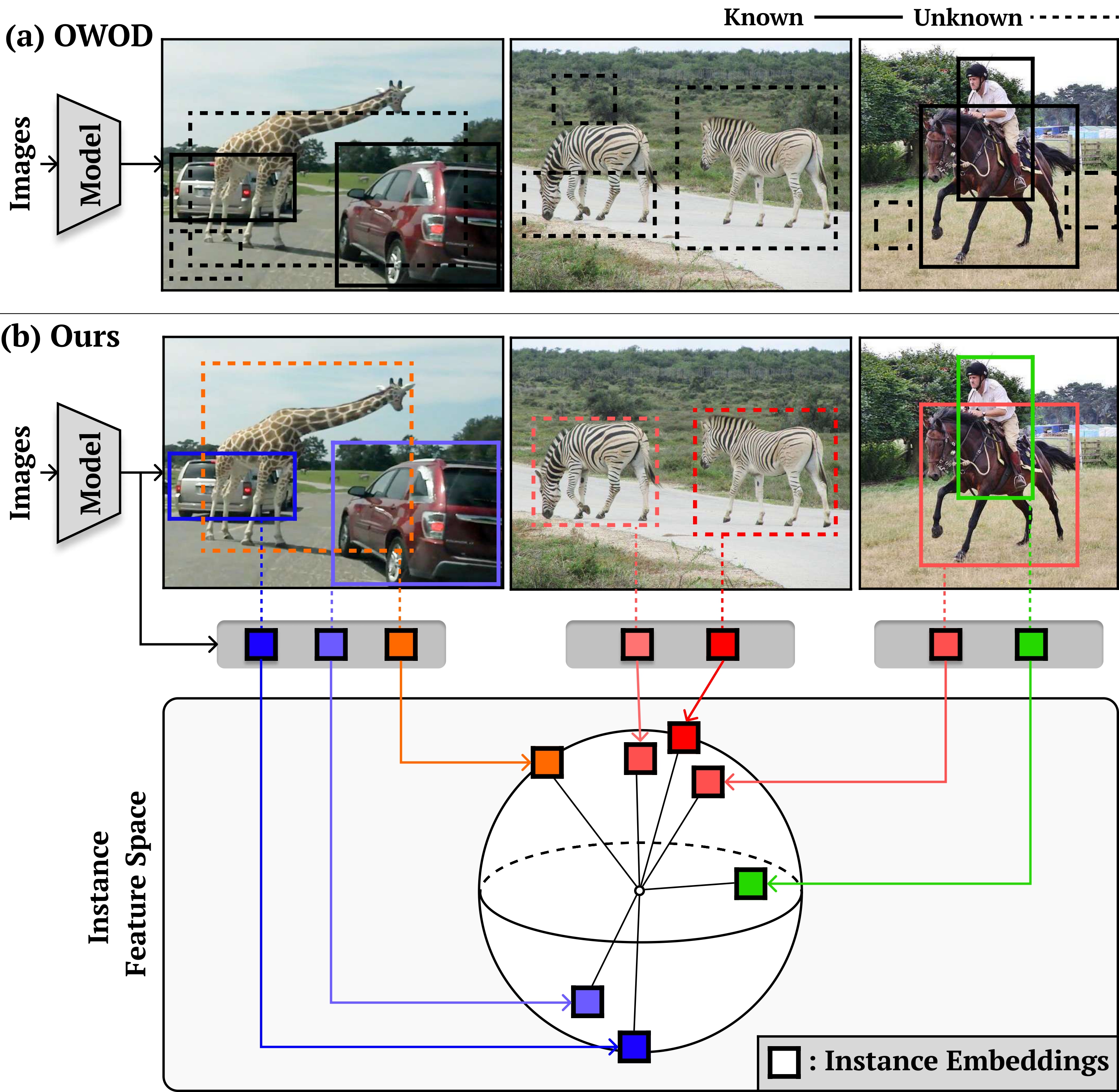
Open-World Object Detection with Instance Representation Learning
Sunoh Lee*, Minsik Jeon*, Jihong Min, Junwon Seo IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2026. project page / video / arXiv A method for Open-World object detection that improves novel object detection and semantically rich feature extraction by leveraging Vision Foundation Models. |
|
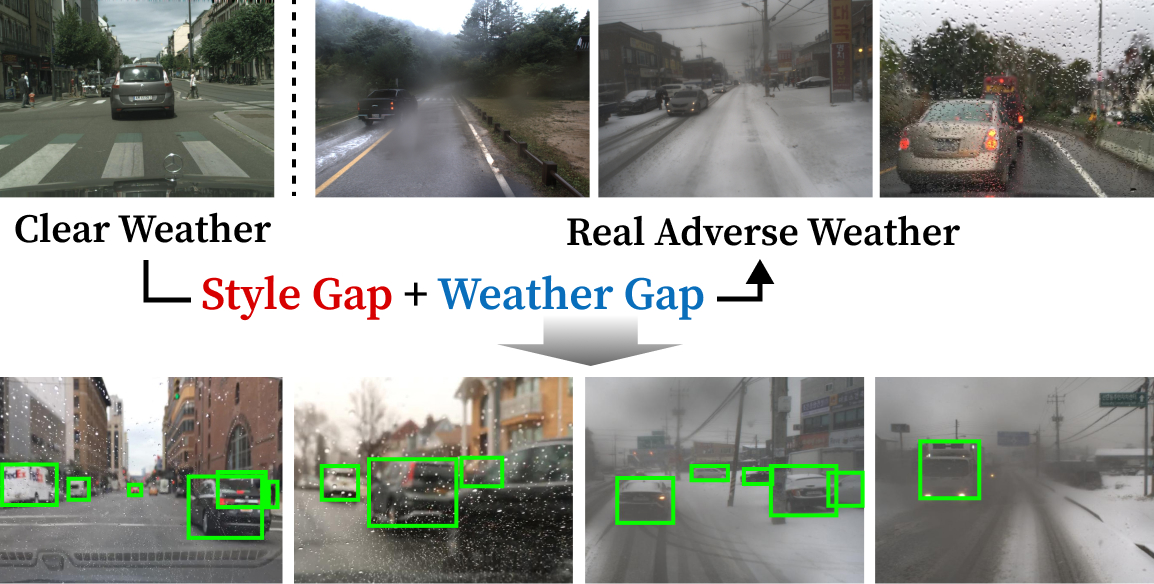
DA-RAW: Domain Adaptive Object Detection for Real-World Adverse Weather Conditions
Minsik Jeon*, Junwon Seo*, Jihong Min IEEE International Conference on Robotics and Automation (ICRA), 2024. project page / video / arXiv An UDA framework for object detection that can effectively adapt to real-world adverse weather conditions by addressing Style & Weather gaps separately. |
Projects |
|
Adaptive Path Planning Based on Situational Awareness and Dynamic Model Learning
Agency for Defense Development, 2023-Present
- Developing perception and control algorithms for off-road navigation:
Robust moving object detection & tracking in off-road environment,
semantic terrain classification map through LiDAR-Camera integration. |
|
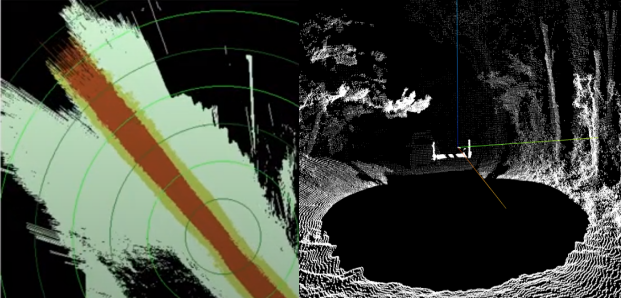
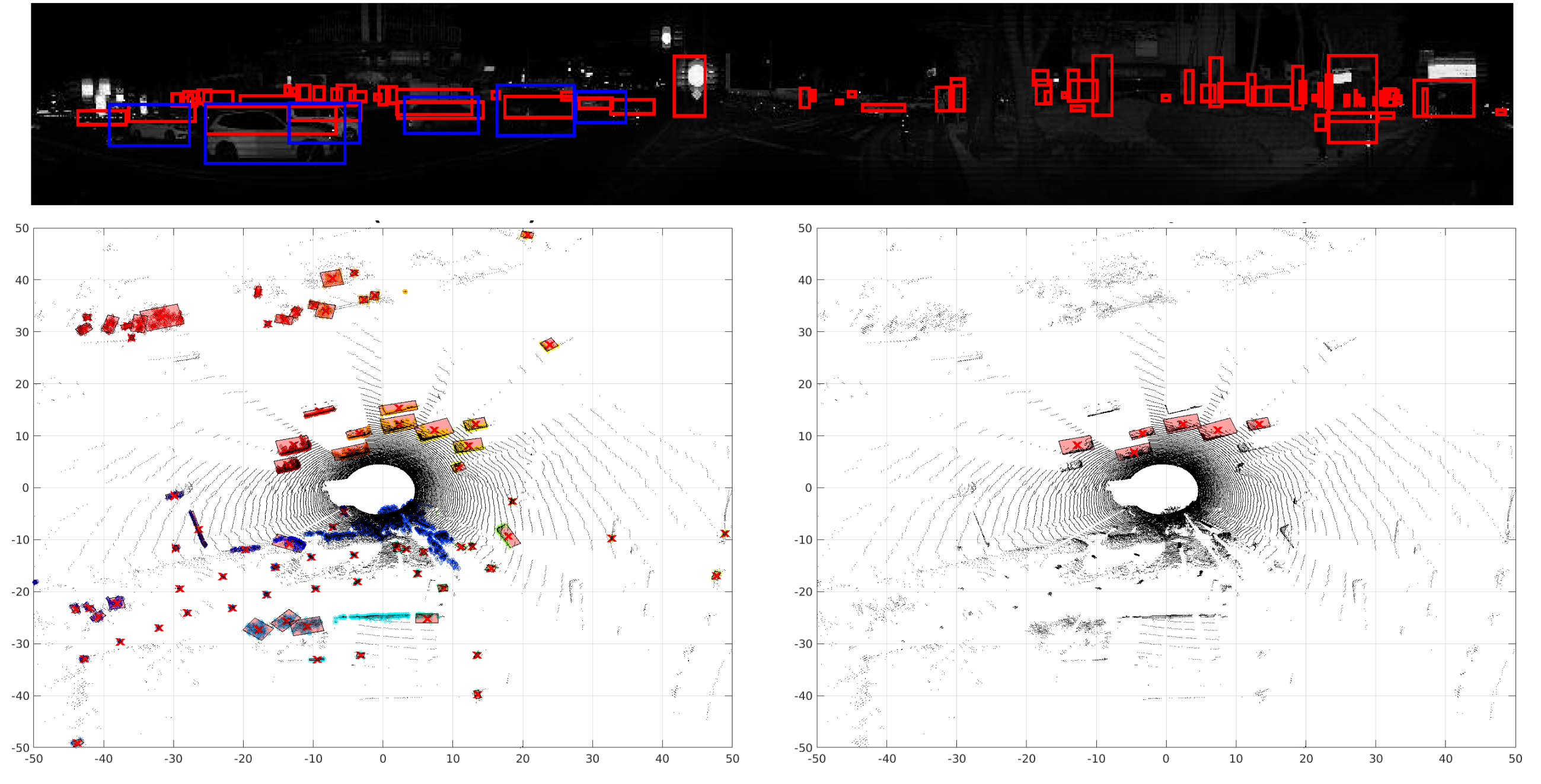
Unmanned reconnaissance vehicles development
Agency for Defense Development, 2023 - Developed an LiDAR-IR fusion method for robust object detection under visibility-constrainted scenarios. |
|
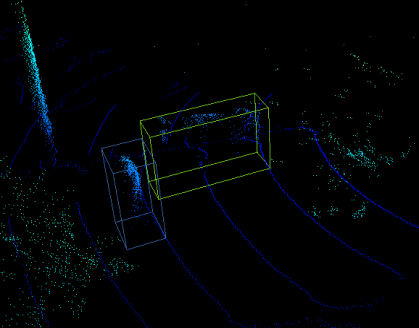
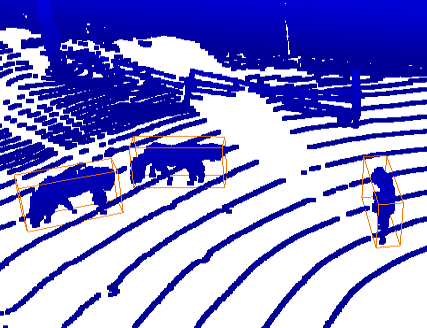
Deformable Object Recognition Technology
Agency for Defense Development, 2022-2023 - Developed an open-set 2D & 3D object detection method for LiDAR pointcloud. |


|
Indy Autonomous Challenge (IAC)
USRG @ KAIST (Advised by Prof. David Hyunchul Shim), 2021 Participated in the Indy Autonomous Challenge (IAC), the first autonomous car racing competition to be held in Indianapolis, as an intern for Team KAIST. As part of a perception team, I tested algorithms using camera and lidar in a simulation environment. |
|
|
Microscopy Image Artifact Removal & Superresolution
NICA Lab @ KAIST (Advised by Prof. Young-Gyu Yoon), 2021
|

|
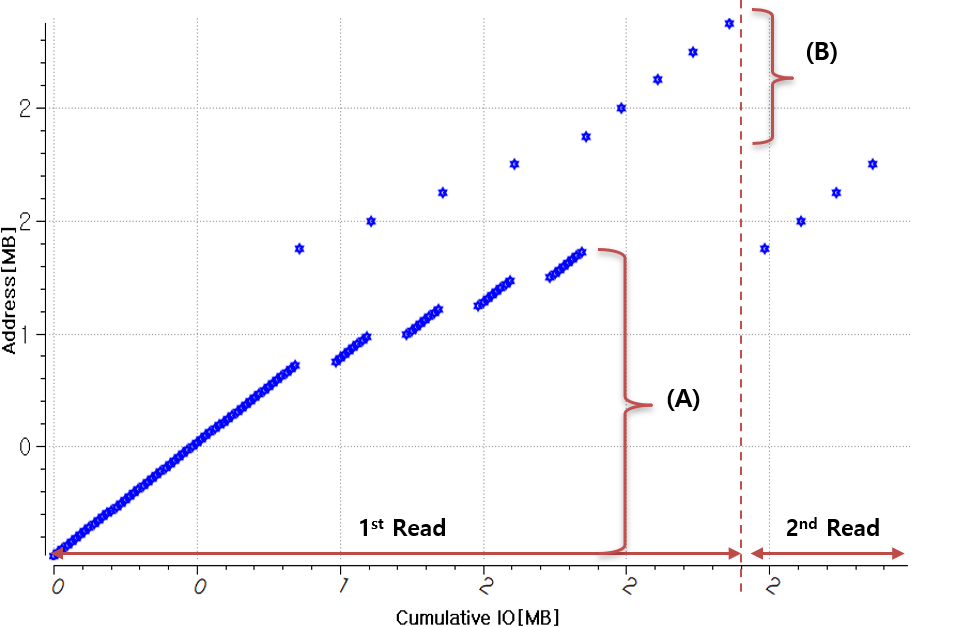
Performance and Operation Analysis of On-Board RAID
SK Hynix, 2020
|
|
Template from Jon Barron's wonderful work. |