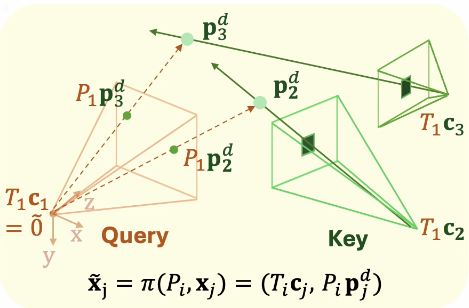
RayRoPE: Projective Ray Positional Encoding for Multi-view Attention
European Conference on Computer Vision (ECCV), 2026
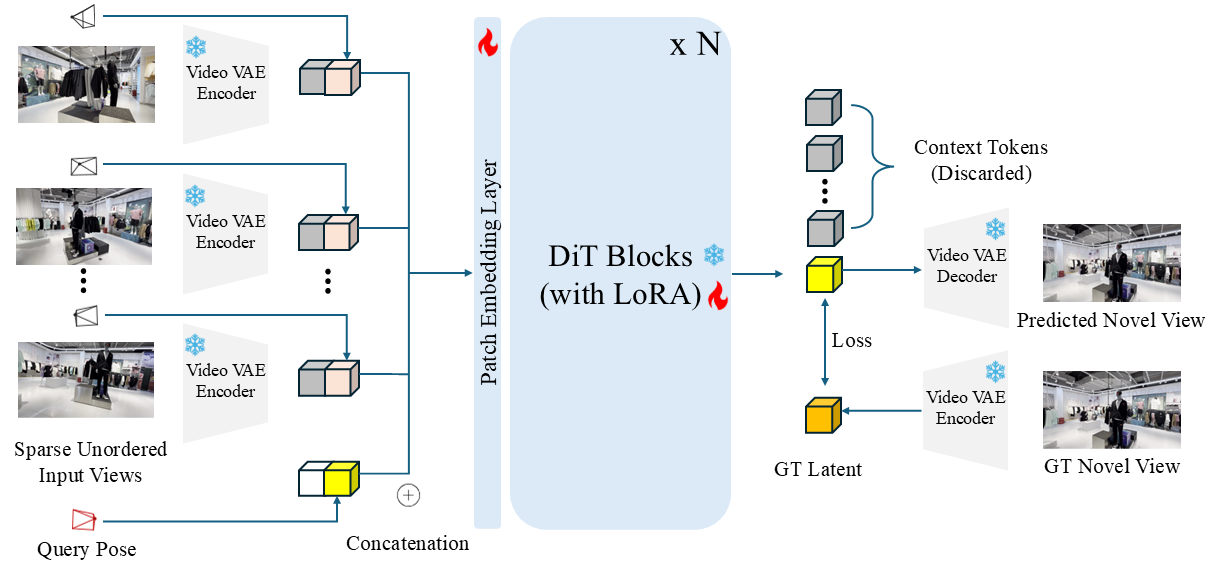
A 3D-aware positional encoding for multi-view transformers that uses predicted depths along rays and projective coordinates to achieve SE(3)-invariant attention adapted to scene geometry.